Anna Franchi
Anna Franchi
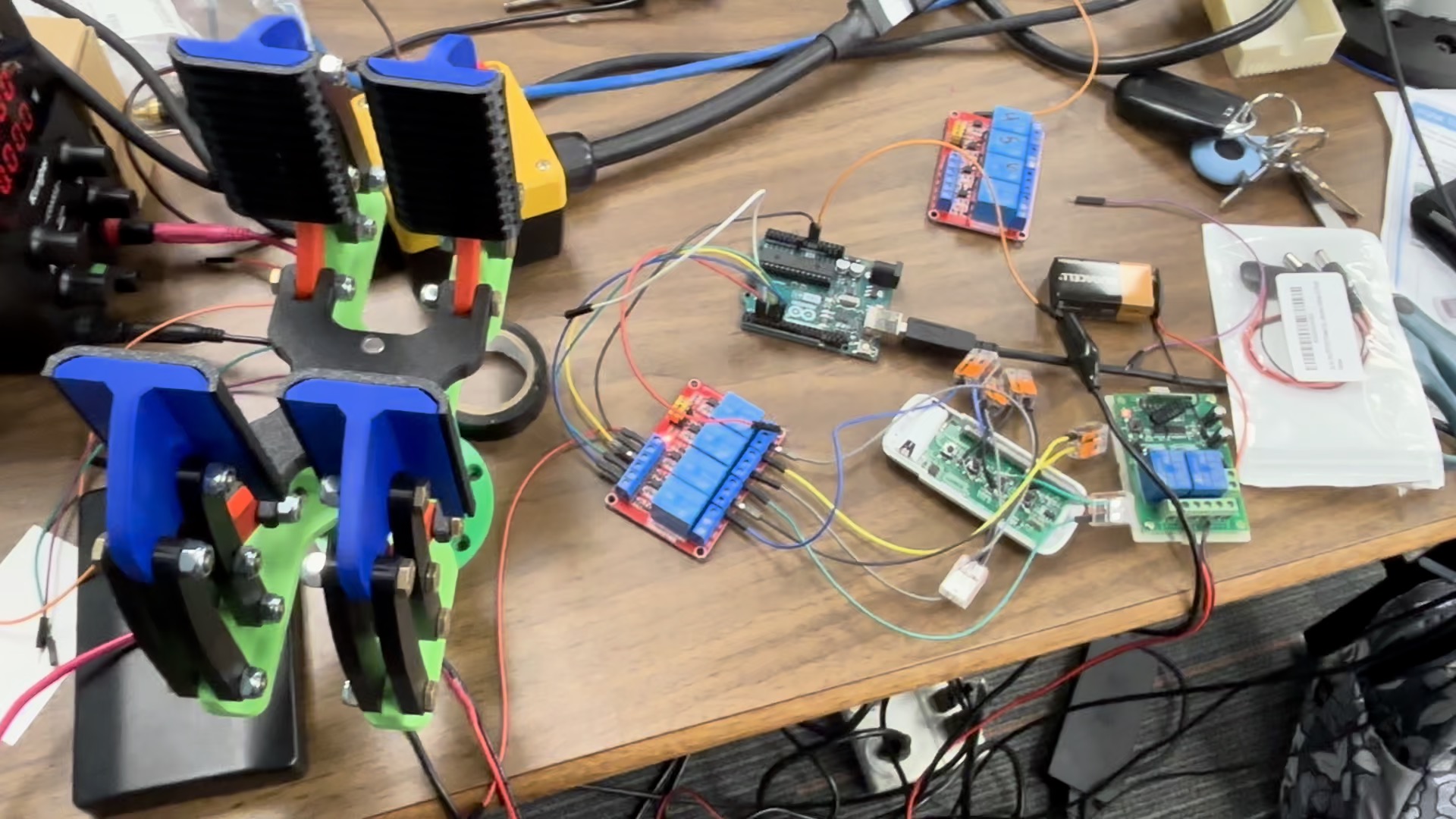
End-Effector Electronics
Published: 28 January 2026 Updated: 19 May 2026, 02:26 UTC
CubeSat Robotics Project
Intro
I worked on a researh project on a small team tasked with controlling a robotic arm to pick out CubeSATs from space. Space trash is a large issues, and a lot of it is CubeSats.
CubeSats are very small (literally cube shaped) satellites that are generally 10cm x 10cm x 10cm. You can have a multi-unit CubeSat, which is just multiple stacked ontop of one another. Generally they hitch rides with NASA or other space launch companies. Since they’re so small, they are relatively cheap to make, so most are made by amatures and students. These missions, however, are usually a one-way ticket. This project aimed at returning these to Earth.
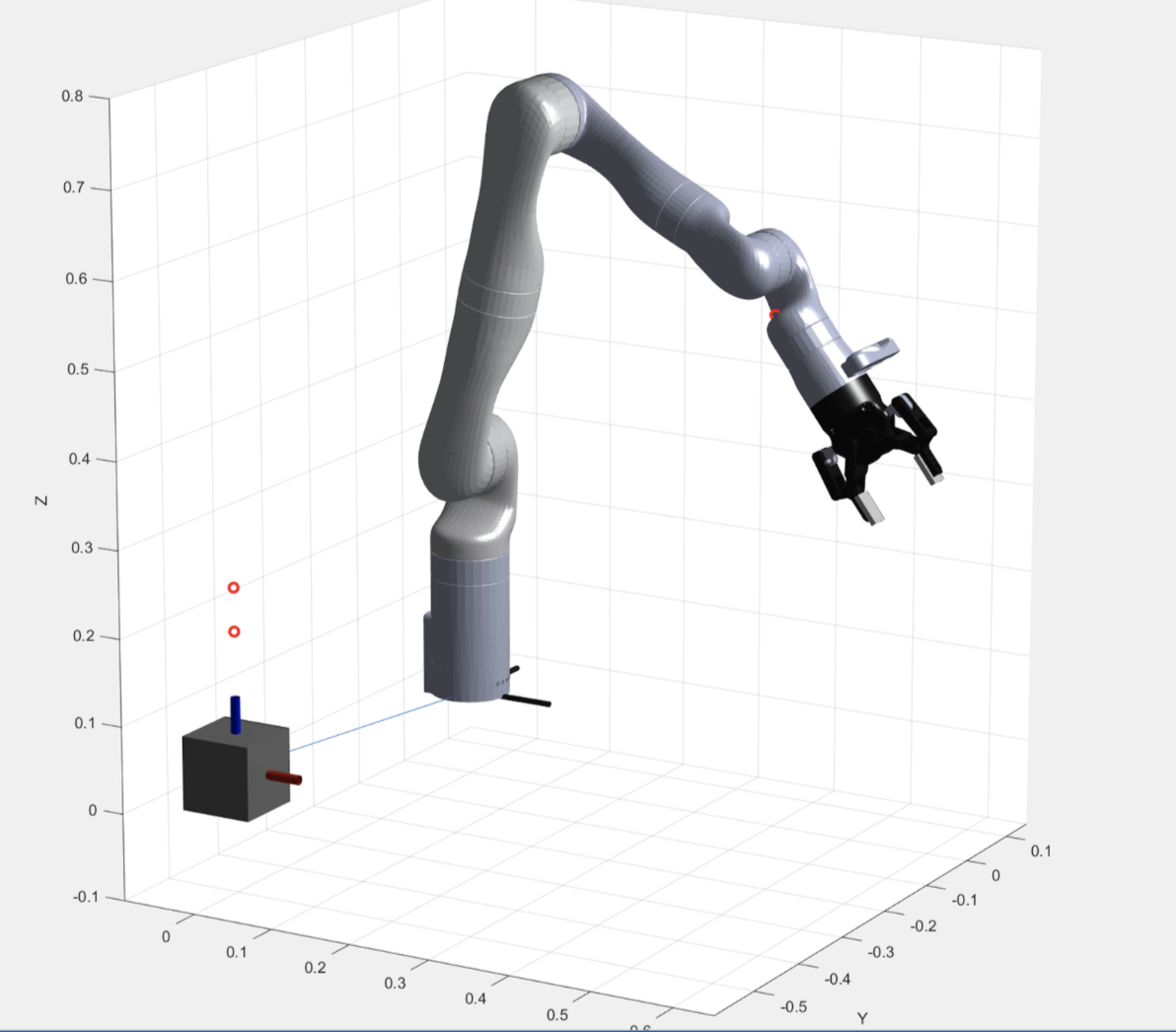
Part 1 - The Gripper
The first part of this project was to get the gripper working. We worked with a professor from New Mexico who came up with a CAD drawing for these parts and shipped them out. It initially came with a remote-activated linear actuator, which made controlling it with MATLAB a little difficult. Upon rev 2 of the gripper, we chose to use a stepper motor instead of the linear actuator. This would made controlling the gripper much easier, effective and precise.

For the moment, however, we chose to short the buttons with relays, since the remote sent a unique signal pattern to the motor controller. It would have been much more effort than it would have been worth to try and reverse-engineer that. This also allowed us to have all the bulky electronics attached to the base of the robot, not the end-effector.
Part 2 - The Robot
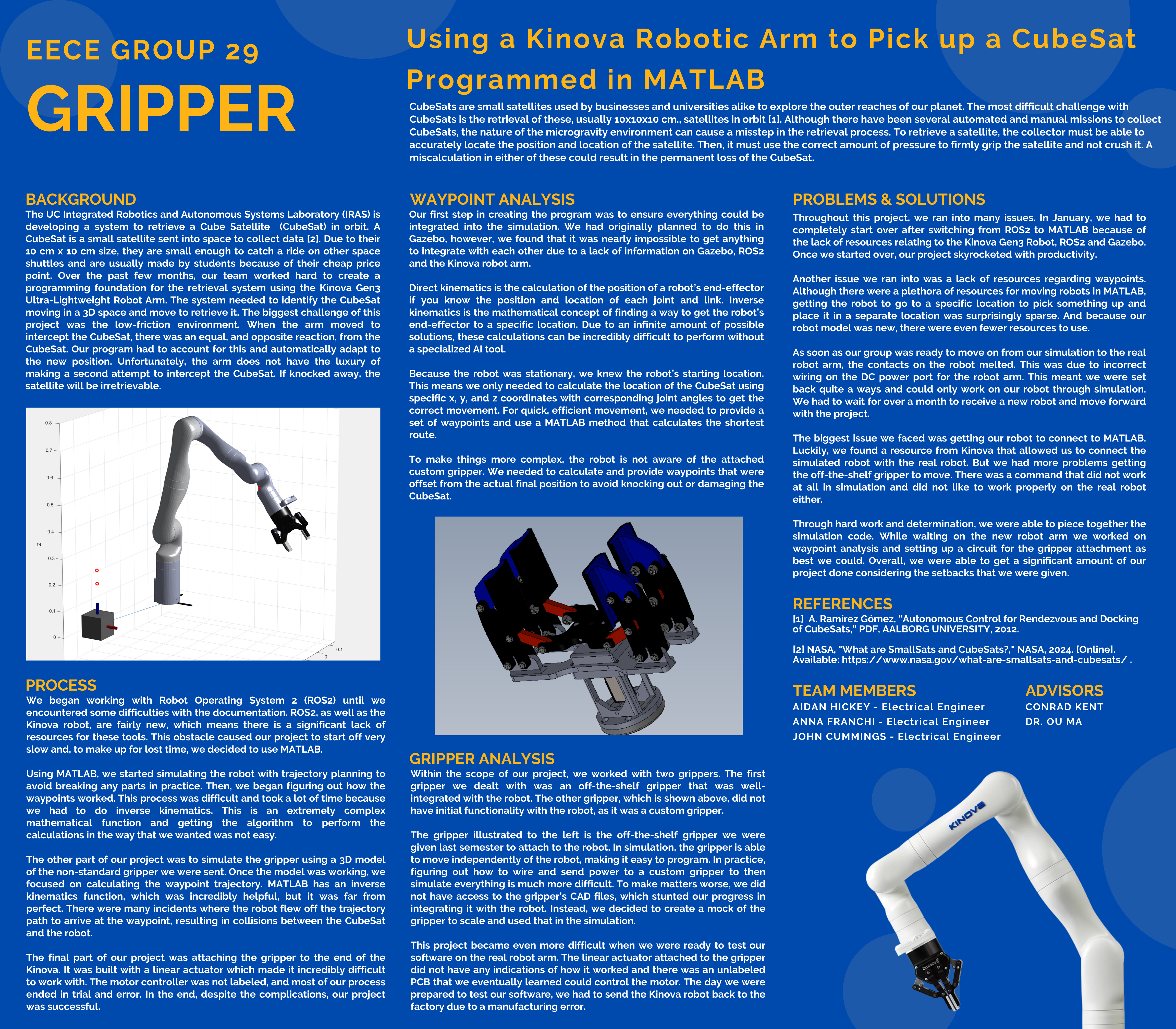
Simulation
The second part of this project was to control the robot arm. This was the BULK of the project, since it was much more complex than just getting a linear actuator moving. Adding to the difficulty, our robot’s contacts exploded when we plugged it into DC power becuase it was wired incorrectly! That’s the first time I’ve ever caused a recall. Luckily everyone was okay and they were able to send us a new robot within two months.
Simulation
Due to this unfortunate event, most of our code was built in MATLAB, since ROS2 was a little over our heads. MATLAB also allowed us to have physics simulators and use an AI model to do inverse-kinematics. We spent countless hours coding the arm in simulation.